
 Pristupačnost
Pristupačnost| Modeliranje servo pogona za zakretanje velikih lopatica rotora i projektiranje sustava upravljanja zakretom lopatica | ||
| Kratki opis: | ||
|
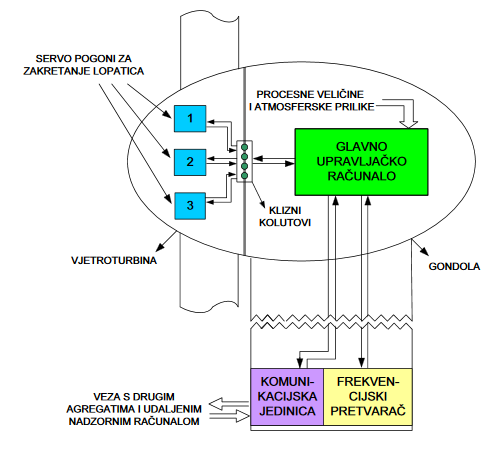
Lopatice suvremenih vjetroagregata dugačke su i preko 50 m i teško više od 10 t. Zakretanje tako velike lopatice oko svoje osi u cilju regulacije brzine vrtnje i snage ima za posljedicu pojavu velikih konstrukcijskih opterećenja. Osim toga, lopatice nisu apsolutno krute već naprotiv vrlo savitljive. Zbog toga zakretanje rezultira i strukturnim vibracijama. Sve navedene pojave treba uzeti u obzir u postupku projektiranja servo sustava za upravljanje zakretom lopatica. Potrebno je izraditi simulacijski model zakretanja lopatice rotora vjetroturbine čiji će izlazi biti strukturna opterećenja i vibracije, a pobuda zakretni moment u korijenu lopatice. Kao vanjski ulaz potrebno je predvidjeti promjenjivu brzinu vjetra. U radu je potrebno kombinirati analitički pristup i eksperimentalnu identifikaciju procesa korištenjem aeroelastičnog simulatora vjetroagregata FAST.
|
||
| Plan za seminarski rad: | ||
|
Modelirati servo pogon za zakret lopatica, sa zakretnim momentom na ulazu, opterećenjima i vibracijama na izlazu modela te vjetrom kao poremećajnom veličinom.
|
||
| Plan za projekt: | ||
|
Identificirani model servo pogona potrebno je povezati s pojednostavljenim matematičkim modelom vjetroagregata i provesti validaciju razvijenog modela korištenjem FAST-a.
|
||
| Plan za diplomski rad: | ||
|
Na osnovi razvijenog matematičkog modela vjetroagregata sa servo pogonom potrebno je provesti sintezu sustava upravljanja zakretom lopatica i provjeriti vladanje sustava u zatvorenoj petlji korištenjem aeroelastičnog modela vjetroagregata u FAST programskom paketu.
|
||
| Predvidivi voditelj: | ||
|
izv. prof. dr. sc. Mario Vašak
|
||
| Više informacija o temi: | ||
| mario.vasak@fer.hr | ||